Tema 4. Semáforos
Contenidos
- 1. Introducción
- 2. Definición
- 3. Problemas inherentes a la programación concurrente
- 4. Exclusión mutua
- 5. Candados, mutexes o locks
- 6. Uso de candados
- 7. POSIX Mutex
- 8. Sincronización genérica
- 9. Algoritmo de Barz
- 10. Condición de sincronización
- 11. Barreras de sincronización
- 12. Barreras para n procesos
- 13. Semáforos fuertes y débiles
- 14. Semáforos para procesos: System V
- 15. Semáforos POSIX
- 16. Semáforos vs. Espera Ocupada
- 17. Variables de condición
- 18. Problemas clásicos
- 19. Aclaraciones
1. Introducción
- Problemas de la espera ocupada
- La espera activa es ineficiente
- Los procesos ocupan el procesador incluso aunque no puedan avanzar
- La espera activa es ineficiente
- El uso de variables compartidas genera esquemas:
- Demasiado complejos
- Muy artificiales
- Propensos a errores: No hay una separación entre las variables de los cómputos de los procesos y las utilizadas para sincronización.
- Inadecuados para grandes esquemas de protección.
- Fuertemente acoplados: los procesos deben de saber unos de otros.
- Los semáforos son señales simples que pueden obligar a un proceso a detenerse en una posición determinada.
- Con la estructura adecuada de señales podemos satisfacer cualquier requisito de coordinación.
- Los semáforos se usan como mecanismo de sincronización entre procesos.
- Los procesos se bloquean o ejecutan condicionados únicamente por el valor de una variable entera
2. Definición
struct Semaphore { unsigned value; Queue q; }
- Es un TAD formado por un valor numérico y una cola de procesos bloqueados.
- Fueron inventados por Edsger Dijkstra (1965) y se usaron por primera vez en el sistema operativo THEOS (1974). En este otro enlace puedes ver un poco más de la intrahistoria de THEOS.
- Un semáforo bloquea un proceso cuando éste no puede realizar la operación deseada, en vez de desperdiciar tiempo de CPU.
- Pseudocódigo para inicializar a 1:
Semaphore s = 1
Operaciones sobre semáforos
P: del holandés "proberen te verlagen" (intentar decrementar). Si el contador es mayor que
0lo decrementa, en caso contrario bloquea el proceso que lo llamó.Más conocida como wait, acquire o lock.
V: del holandés "verhoog" (incrementar). Si hay algún proceso bloqueado en el semáforo, lo desbloquea, en caso contario, incrementa el valor de la variable.
Más conocida como signal, release o post.
1: def wait(s): 2: if s.value > 0: 3: s.value -= 1 (1) 4: else: 5: add(process, s.queue) 6: block(process) (2)
- En (1) si es mayor que
0, se decrementa el valor del semáforo - En (2) si es
0, se bloquea el proceso que llamó a wait
1: def signal(s): 2: if empty(s.queue): 3: s.value += 1 (1) 4: else: 5: process = get(s.queue) 6: sched(process) (2)
- En (1) si no hay procesos bloqueados en la cola del semáforo, se incrementa su valor
- En (2), en caso contrario, se desbloquea a un proceso
- Otras operaciones que dependen de la implementación concreta:
- Asignar un valor al semáforo
- Obtener el valor del semáforo
- Intentar wait sólo si no produce bloqueo del proceso (
try_lock) - Elección de la política de desbloqueo de procesos
- …
La definición de un semáforo implica la exclusión mutua en la ejecución de las operaciones por él definidas
Esta exclusión mutua se consigue mediante funciones proporcionadas por el sistema operativo (típicamente espera con bloqueo)
3. Problemas inherentes a la programación concurrente
- Los semáforos son una herramienta para resolver problemas tanto de
exclusión mutua como de sincronización.
- Exclusión mutua:
- sólo uno de los procesos debe estar en la sección crítica en un instante dado.
- Sincronización:
- un proceso debe esperar la ocurrencia de un evento para poder seguir ejecutándose.
4. Exclusión mutua
1: Semaphore s = 1 2: ... 3: s.wait() 4: critical_section() 5: s.signal() 6: ...
- Cuando el primer proceso entre a la sección crítica decrementará su valor y continuará.
- Si otro proceso desea entrar,
valueserá cero, por lo que se bloqueará hasta que el primero ejecutesignal. - Veamos los programas
semaphore.cysemaphore.py - En
javatambién hay semáforos, pero no se suelen utilizar si no se está portando código de otros lenguajes.
5. Candados, mutexes o locks
Semáforos binarios optimizados para exclusión mutua
- Inicializados a
1por defecto - Sólo el proceso que hizo
waitpuede hacersignal. Esto es una diferencia fundamental con los semáforos. - Algunos sistemas permiten que el mismo hilo haga varios
wait, si ya es propietario dellockcontinúa su ejecución. Se denominan reentrantes.
6. Uso de candados
1: Mutex mutex 2: ... 3: mutex.lock() 4: critical_section() 5: mutex.unlock() 6: ...
- En C los mutex están en la biblioteca POSIX Threads y no son
reentrantes (
mutex.c). - En Python tenemos
threading.Lock(no reentrante) ythreading.Rlock(reentrante). Se pueden usar también con la cláusulawith(programaslock.pyylock_with.py). - En la biblioteca estándar de C++ tenemos mutex, thread, condition variable, etc…
- En D tenemos la parte de bajo nivel de su biblioteca estándar
core.sync(mutex, semaphore, condition, etc…) y otros componentes de alto nivel como: std.parallelism o std.process. - En Vala tenemos un API orientado a objetos sobre GLib (Mutex, Thread).
- En la biblioteca estándar de rust disponemos de hilos y primitivas de sincronización (mutex, condvar, etc…), pero no de semáforos. En éste último caso hemos de recurrir a bibliotecas externas.
7. POSIX Mutex
Si nuestra aplicación se compone de un sólo proceso con múltiples hilos, la biblioteca
pthread.hproporciona mutex (semáforos binarios para hilos).1: #include<pthread.h> 2: 3: pthread_mutex_t mutex = PTHREAD_MUTEX_INITIALIZER; 4: 5: // inicializar con los atributos por defecto 6: int pthread_mutex_init (...) // para otras inicializaciones 7: int pthread_mutex_destroy(...) // destruir el candado 8: int pthread_mutex_lock(...) // bloquear candado o espera si bloqueado 9: int pthread_mutex_trylock(...); // bloquear candado y no espera si bloqueado 10: int pthread_mutex_unlock(...) // desbloquear candado 11: ... 12: 13: // Declaración de los datos compartidos y del candado que los protege 14: 15: struct datos_compartidos { 16: declaración de los datos 17: pthread_mutex_t candado; 18: } datos; 19: ... 20: void codigo_hilo(void *arg){ 21: ... 22: pthread_mutex_lock(&datos.candado); 23: // seccion critica 24: pthread_mutex_unlock(&datos.candado); 25: ... 26: } 27: 28: void main(){ 29: pthread_t hilo_1, hilo_2; 30: int error; 31: ... 32: // Inicializacion del candado 33: error = pthread_mutex_init (&datos.candado, NULL); 34: //pthread_mutex_t datos.candado = PTHREAD_MUTEX_INITIALIZER; 35: if (error) 36: // tratamiento del error 37: 38: // Creación de los hilos 39: error = pthread_create(&hilo_1, NULL, codigo_hilo, NULL); 40: if (error) 41: // tratamiento del error 42: error = pthread_create(&hilo_1, NULL, codigo_hilo, NULL); 43: if (error) 44: // tratamiento del error 45: ... 46: }
8. Sincronización genérica
- El valor del semáforo puede interpretarse como un indicador del número de recursos disponibles (permits).
- Indica el número de llamadas que se pueden hacer a
waitsin provocar bloqueo. - En exclusión mutua debe ser
1. En este caso reciben el nombre de semáforos binarios. - Mecanismos más complejos requieren otros valores (por ejemplo, un número máximo de procesos, de impresoras, de procesadores, … ). Se denominan multiplexes.
9. Algoritmo de Barz
- Sirve para simular semáforos generales con semáforos binarios
1: BinarySemaphore mutex = 1 2: BinarySemaphore gate = 1 3: value = k 4: 5: def generalWait(): 6: gate.wait() # si no es el primero debe esperar 7: mutex.wait() 8: value -= 1 9: if value > 0: 10: gate.signal() # permite que entre otro si el valor es positivo 11: mutex.signal() 12: 13: def generalSignal(): 14: mutex.wait() 15: value += 1 16: if value == 1: 17: gate.signal() # antes estaba en cero, permite que entre otro 18: mutex.signal()
10. Condición de sincronización
- Se asocia un semáforo general a cada condición.
- Un proceso espera a que una condición se cumpla ejecutando -en
principio- una operación
wait. - Cuando un proceso ha hecho que se cumpla una determinada condición,
lo indica ejecutando un
signalsobre dicho semáforo.
- Ejemplo de
2procesos concurrentes donde Q no puede ejecutar Q2 hasta que P haya ejecutado P1. ¿Qué haríais?- ¿Cuántos semáforos utilizaríais y a qué los inicializaríais?
¿Dónde pondríais las operaciones
wait()ysignal()de cada semáforo?P Q ... ... P1 Q1 P2 Q2 ... ...
La solución usando un semáforo con valor inicial 0
Semaphore sync = 0 P Q ... ... P1 Q1 sync.signal() sync.wait() P2 Q2 ... ...
- Ejemplo de
2procesos concurrentes donde ambos procesos deben esperarse en el punto1- ¿Cuántos semáforos utilizaríais y a qué los inicializaríais?
¿Dónde pondríais las operaciones
wait()ysignal()de cada semáforo?P Q ... ... P1 Q1 (1) (1) P2 Q2 ... ...
La solución usando dos semáforos s y t con valores iniciales 0
Semaphore s = 0 Semaphore t = 0 P Q ... ... P1 Q1 s.signal() t.signal() t.wait() s.wait() P2 Q2 ... ...
Ejemplo de
3procesos concurrentes donde Q solo puede pasar a ejecutar Q2 si R ha ejecutado R1 o P ha ejecutado P1P Q R ... ... ... P1 Q1 R1 P2 Q2 R2 ... ... ...
La solución utilizando un semáforo con valor inicial 0
Semaphore sync = 0 P Q R ... ... ... P1 Q1 R1 sync.signal() sync.wait() sync.signal() P2 Q2 R2 ... ... ...
Ejemplo de
3procesos concurrentes donde Q solo ejecuta Q2 si R ha ejecutado R1 y P ha ejecutado P1P Q R ... ... ... P1 Q1 R1 P2 Q2 R2 ... ... ...
Solución 1: ¿Es correcta?
Semaphore sync = 0
P Q R
... ... ...
P1 Q1 R1
sync.signal() sync.wait() sync.signal()
P2 sync.wait() R2
... Q2 ...
...
Solución 2: Usar dos semáforos s y t con valor inicial 0
Implica dos sincronizaciones: de P y Q por un lado y Q y R por otro.
Semaphore s = 0 Semaphore t = 0 P Q R ... ... ... P1 Q1 R1 s.signal() s.wait() t.signal() P2 t.wait() R2 ... Q2 ... ...
11. Barreras de sincronización
- Los casos anteriores son ejemplos de barreras de sincronización, los programas concurrentes se sincronizan por fases: todos los procesos deben esperar que termine la fase actual para comenzar simultáneamente la siguiente.
- Cuando el número de procesos es pequeño basta con utilizar un semáforo por cada punto de espera
- Cuando aumenta el número de procesos esta solución es altamente ineficiente por el coste de los semáforos
12. Barreras para n procesos
El problema general se puede representar mediante sincronizaciones cíclicas del tipo:
1: while True: 2: do_phase() 3: barrier(n)
- Y se puede solucionar con dos semáforos y un contador con actualización atómica
- Si no se dispone de este tipo de contador se necesita además un candado
- Algunos lenguajes implementan, o están en proceso de implementar, este tipo de barreras.
1: Semaphore arrival = 1 2: Semaphore departure = 0 3: counter = 0 4: 5: def barrier(n): 6: arrival.wait() 7: getAndAdd(counter, 1) 8: if counter < n: 9: arrival.signal() (1) 10: else: 11: departure.signal() (2) 12: 13: departure.wait() (3) 14: 15: getAndAdd(counter, -1) 16: if counter > 0: 17: departure.signal() (4) 18: else: 19: arrival.signal() (5)
- En (1) si no llegaron todos los procesos, permite la llegada de otro
- En (2) si llegaron todos, autoriza la salida de un proceso
- En (3) espera la autorización para continuar
- En (4) si no salieron todos, autoriza la salida del siguiente
- En (5) si llegaron todos, comienza nuevamente el ciclo de llegadas
- Veamos cómo queda el código completo (
barrier.py)
13. Semáforos fuertes y débiles
- Fuertes:
- la cola de procesos sigue una política FIFO estricta
- Débiles:
- si los procesos se seleccionan aleatoriamente
14. Semáforos para procesos: System V
- Se compone de los siguientes elementos:
- El valor del semáforo
- El identificador del último proceso que lo manipuló
- El número de procesos que hay esperando a que el valor del semáforo se incremente
- El número de procesos que hay esperando a que el semáforo tome el
valor
0
- Ejemplos de código
sem-1.cysinSem-1.c
15. Semáforos POSIX
- Debemos incluir la cabecera
semaphore.h - Estándar relativamente reciente (1993)
- Utiliza funciones clásicas sobre semáforos
- El tipo del semáforo es
sem_ty almacena toda la información relativa al semáforo - Dos tipos:
- Semáforos nominales :
- para sincronizar procesos no relacionados. Tienen asociado un nombre en la jerarquía del sistema de ficheros
- Semáforos anónimos :
- para sincronizar procesos de una misma jerarquía o hilos de un mismo proceso
- Veamos el código de
semPosix.cy debuffer-circular-hilos.c
16. Semáforos vs. Espera Ocupada
- Si los semáforos residen en la memoria compartida y por tanto hay que acceder a ellos en exclusión mutua, ¿no es la pescadilla que se muerde la cola?
- En algún momento habrá que recurrir a mecanismos de más bajo nivel…
- ¿Cuál pensáis entonces que es la ventaja fundamental de los semáforos?
- Espera ocupada :
protocolo entrada espera ocupada Sección Crítica (código usuario, duración no definida) protocolo salida espera ocupada
- Semáforo :
protocolo entrada espera ocupada sección crítica wait (corta) protocolo salida espera ocupada sección crítica (código usuario) protocolo entrada espera ocupada sección crítica signal(corta) protocolo salida espera ocupada
17. Variables de condición
17.1. Idea de funcionamiento
- Las variables de condición se introducen para simplificar una situación bastante habitual en la sincronización de hilos.
- La situación se da cuando un hilo necesita esperar a que se cumpla un predicado en el que intervienen varias variables compartidas con otro u otros hilos.
- Al ser variables compartidas se las protege con un
mutex.
- Las variables de condición nos permiten que un hilo espere dormido el cumplimiento de ese predicado además de que el otro hilo le avise mediante la propia variable de condición de que ha habido un cambio en una o varias de las variables que conforman el predicado -no que el predicado se cumple-.
- Es entonces cuando el otro hilo despierta y comprueba si con los nuevos valores de las variables compartidas se cumple el predicado.
- Para ello:
- Obtiene el mutex
- Comprueba el predicado
- Si el predicado es cierto hace su trabajo y libera el mutex
- Si el predicado es falso llama a
cond_waity vuelve al punto2la siguiente vez. cond_waitbloquea el hilo y libera el mutex.
17.2. Ejemplo
Supongamos que el predicado es que dos variables
xeytengan el mismo valor:x == y.// 'v' es una variable de condicion // 'm' es un mutex // Hilo A // Hilo B lock_mutex(&m); lock_mutex(&m); while ( x != y ) x += 3; cond_wait(&v, &m); cond_signal(&v); // Thread CS // Thread CS unlock_mutex(&m); unlock_mutex(&m);
- Importante: trata de entender por qué el
Hilo Allama acond_waiten un bucle en lugar de con unif. - Tras
Bllamar acond_signalelcond_waitdeApuede que no se complete siBno llama aunlock_mutex.
17.3. Posix API
#include <pthread.h> pthread_cond_t v = PTHREAD_COND_INITIALIZER; int pthread_cond_init(pthread_cond_t *cond, const pthread_condattr_t *attr); int pthread_cond_destroy (pthread_cond_t *cond); int pthread_cond_wait (pthread_cond_t *cond, pthread_mutex_t *mutex); int pthread_cond_signal(pthread_cond_t *cond); int pthread_cond_broadcast(pthread_cond_t *cond);
18. Problemas clásicos
- Productor-consumidor
- Lectores-escritores
- Comida de los filósofos
18.1. Productor-consumidor
- Es un modelo muy común en informática.
- La mayoría de lenguajes proporcionan implementaciones nativas o en bibliotecas
- Características del problema:
- Para que sea asíncrono es necesario un buffer
- Productor deposita elementos en un buffer
- Consumidor recoge los elementos del buffer
- Dos variantes:
- Buffer limitado
- Buffer ilimitado
- Restricciones:
- El consumidor debe esperar a que el buffer tenga elementos a consumir.
- Exclusión mutua en el acceso al buffer.
- Si el buffer es limitado, el productor debe esperar que haya posiciones vacías si éste está lleno.
Buffer infinito (
producer-consumer-infinite.py)1: Queue buffer 2: Semaphore mutex = 1 3: Semaphore notEmpty = 0 4: 5: # Productor 6: while True: 7: data = produce() 8: 9: mutex.wait() 10: buffer.add(data) 11: mutex.signal() 12: 13: notEmpty.signal() 14: 15: # Consumidor 16: while True: 17: notEmpty.wait() 18: 19: mutex.wait() 20: data = buffer.get() 21: mutex.signal() 22: 23: consume(data)
Buffer limitado (
producer-consumer.py)1: Queue buffer 2: Semaphore mutex = 1 3: Semaphore notEmpty = 0 # To get 4: Semaphore notFull = BUFFER_SIZE # To put 5: 6: # Productor 7: while True: 8: data = produce() 9: 10: notFull.wait() # Espera sitio poner producto 11: 12: mutex.wait() 13: buffer.add(data) 14: mutex.signal() 15: 16: notEmpty.signal() # Avisa que hay producto 17: 18: # Consumidor 19: while True: 20: notEmpty.wait() # Espera a que haya producto 21: 22: mutex.wait() 23: data = buffer.get() 24: mutex.signal() 25: 26: notFull.signal() # Avisa de sitio para nuevo producto. 27: 28: consume(data)
18.2. Lectores-escritores
- Características del problema :
- Lectores desean leer un recurso, dos o más pueden acceder simultáneamente al recurso
- Escritores actualizan la información en un recurso, sólo uno puede acceder al recurso: acceso exclusivo al recurso
- Dos versiones distintas del problema:
- Prioridad en la lectura: ningún lector debe esperar salvo que un escritor haya ya obtenido permiso para usar el recurso. Ningún lector debe esperar a que otros lectores acaben por el simple hecho de que un escritor esté esperando
- Prioridad en la escritura: una vez que el escritor está esperando, pasará el primero, es decir, ningún lector podrá iniciar su lectura
- ¿Qué problema presenta la primera versión? ¿Y la segunda?
18.2.1. Lectores-escritores: prioridad lectura
Código completo (
rw_lock.py)1: readers = 0 # num. lectores en la Secc. crítica 2: Semaphore writer = 1 # mutex para escritor 3: Semaphore mx = 1 # mutex acceso a variable "readers" y barrera 4: # para los escritores 5: 6: def writer_lock(): def writer_unlock(): 7: writer.wait() writer.signal() 8: 9: def reader_lock(): def reader_unlock(): 10: mx.wait() mx.wait() 11: readers += 1 readers -= 1 12: if readers == 1: if readers == 0: 13: writer.wait() writer.signal() 14: mx.signal() mx.signal()
18.2.2. Lectores-escritores: prioridad escritura (versión 1)
Archivo:
rw_lock_fair.py1: readers = 0 # num. lectores en la Secc. crítica 2: Semaphore writer = 1 # mutex para escritor 3: Semaphore mx = 1 # mutex acceso a variable "readers" y barrera 4: Semaphore entry = 1 # bloquea FUTUROS lectores cuando un escritor 5: # quiere entrar 6: 7: def writer_lock(): def writer_unlock(): 8: entry.wait() writer.signal() 9: writer.wait() entry.signal() 10: 11: def reader_lock(): def reader_unlock(): 12: entry.wait() mx.wait() 13: mx.wait() readers -= 1 14: readers += 1 if readers == 0: 15: if readers == 1: writer.signal() 16: writer.wait() mx.signal() 17: mx.signal() 18: entry.signal()
18.2.3. Lectores-escritores: prioridad escritura (versión 2)
- Los dos
waitsobre los semáforosentryymxhacen ineficiente al algoritmo anterior - El código
rw_fair_faster.pyes una implementación posterior (2013) que evita este problema - POSIX y Java ofrecen implementaciones para el problema de los lectores-escritores
18.3. Comida de filósofos
- Cinco filósofos se dedican a pensar y a comer en una mesa circular.
- En el centro de la mesa hay un cuenco con arroz, y la mesa está puesta con cinco platos y cinco palillos, uno por cada filósofo.
- Cuando un filósofo tiene hambre se sienta en la mesa a comer en su sitio.
- El filósofo sólo puede coger un palillo cada vez y no le puede quitar un palillo a un compañero que lo tenga en la mano.
- Cuando un filósofo tiene los dos palillos come sin soltarlos hasta que termine y vuelva a pensar.
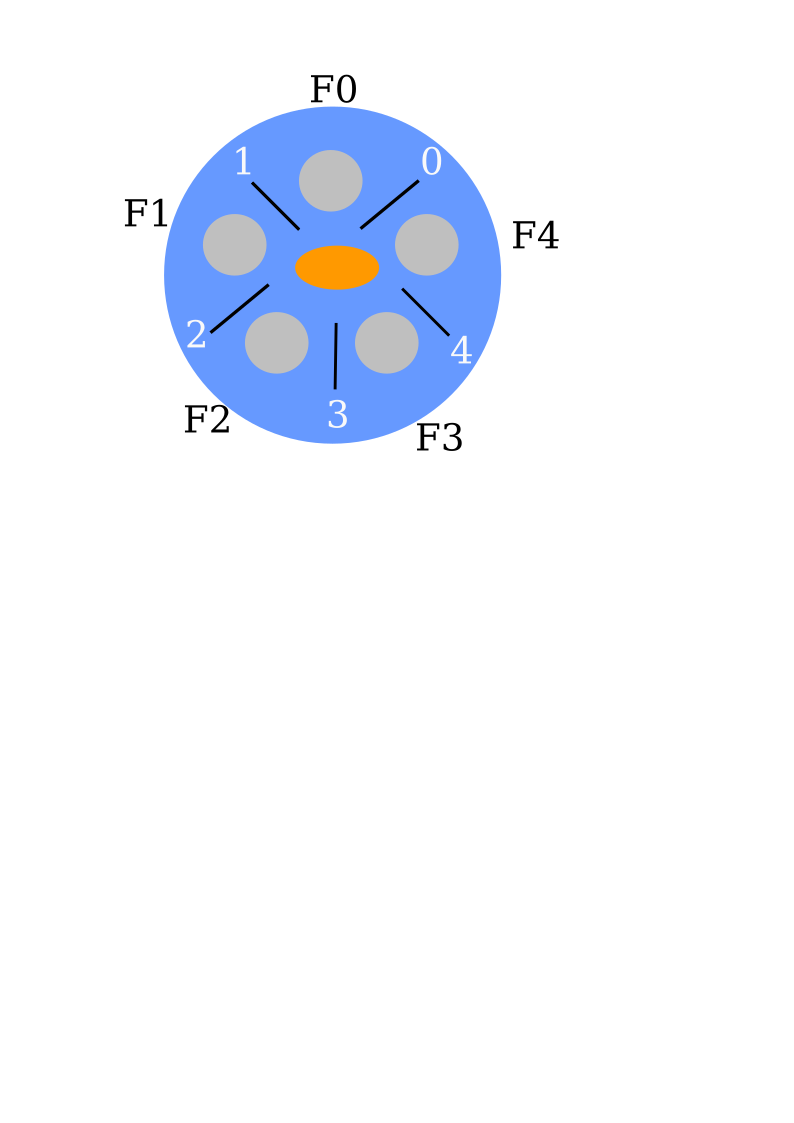
Figure 1: Comida filósofos.
- Ilustra los problemas básicos de interbloqueo.
- Representa los problemas relacionados con la coordinación de los recursos no compartibles de un sistema.
- Es objeto habitual de estudio y comparación entre los diferentes mecanismos de sincronización
1: def philosopher(): 2: while True: 3: think() 4: pick() (1) 5: eat() 6: release() (2)
- En (1) se asegura que puede coger los dos palillos
- En (2) libera ambos palillos
18.3.1. Comida de filósofos (solución 1)
- Exclusión mutua a toda la mesa
Sólo un filósofo puede comer a la vez
1: Semaphore table = 1 2: 3: def philosopher(): 4: while True: 5: think() 6: table.wait() 7: eat() 8: table.signal()
- Solución ineficiente, porque podrían comer dos
18.3.2. Comida de filósofos (solución 2)
- Exclusión mutua a cada palillo
El filósofo i tendrá que coger los palillos i e (i+1)%5
1: Semaphore forks[5] = [1, 1, 1, 1, 1] 2: 3: def philosopher(i): def pick(i): 4: while True: forks[i].wait() 5: think() forks[right(i)].wait() 6: pick(i) 7: eat() def release(i): 8: release(i) forks[i].signal() 9: forks[right(i)].signal() 10: def right(i): 11: return (i+1)%5
18.3.3. Comida de filósofos (¿solución 2?)
- El filósofo coge primero el palillo izquierdo y después el derecho. Si alguno ya está cogido se queda esperando a que lo suelten
Pero si todos quieren comer simultáneamente puede aparecer un problema:
1: # Tenedor izquierdo 2: forks[0].wait() # Filosofo 0 3: forks[1].wait() # Filosofo 1 4: forks[2].wait() # Filosofo 2 5: forks[3].wait() # Filosofo 3 6: forks[4].wait() # Filosofo 4 7: 8: # Tenedor derecho 9: forks[1].wait() # Filosofo 0 10: forks[2].wait() # Filosofo 1 11: forks[3].wait() # Filosofo 2 12: forks[4].wait() # Filosofo 3 13: forks[0].wait() # Filosofo 4
18.3.4. Interbloqueos
Se pueden producir cuando hay competencia por recursos compartidos, por ejemplo:
P Q get(a) get(b) ... ... get(b) get(a)
- Ambos procesos se bloquean mutuamente esperendo a que el otro libere el recurso
- No hay progreso en la ejecución
18.3.5. Condiciones para interbloqueo
- Exclusión mutua
- Retención y espera
- Un proceso mantiene los recursos asignados hasta la asignación de otro
- No apropiación
- No se puede quitar un recurso ya asignado
- Espera circular
- Se produce un ciclo cerrado de procesos esperando por recursos ya asignados
18.3.6. Resolviendo el interbloqueo
- Hay que impedir alguna de las circunstancias anteriores
- Lo más sencillo es romper la espera circular
El filósofo que provoca el interbloqueo debe coger los palillos en otro orden (fíjate que el filosofo4 ha cambiado el orden), por eso hacemos:
1: def pick(i): 2: if i < right(i): # i == 0 3: forks[i].wait() 4: forks[right(i)].wait() 5: else: 6: forks[right(i)].wait() 7: forks[i].wait()
- Se resuelve el interbloqueo, pero…
- La solución no es óptima: en alguna traza podrían comer dos filósofos y sólo come uno
Esperan los filósofos 0, 1, 2 y 4. Sólo come el 3
1: forks[0].wait() # Filosofo 0 2: forks[1].wait() # Filosofo 1 3: forks[2].wait() # Filosofo 2 4: forks[3].wait() # Filosofo 3 5: forks[0].wait() # Filosofo 4, Wait en orden decreciente, se bloquea 6: 7: forks[1].wait() # Filosofo 0 8: forks[2].wait() # Filosofo 1 9: forks[3].wait() # Filosofo 2 10: forks[4].wait() # Filosofo 3, tiene tenedor 4 libre, come y 11: # los otros esperan
18.3.7. ¿Solución óptima?
- Cambio de enfoque: lo vemos como un problema de sincronización
- Un filósofo podrá estar en cualquiera de estos estados:
THINKING,HUNGRY,EATING - Un filósofo podrá comer si ninguno de sus vecinos está comiendo, en otro caso espera a que le notifiquen que han acabado
- No hay deadlocks, pero podría darse el caso de que un filósofo no comiera nunca…
- Disponemos de un array para representar el estado de los filósofos
y un semáforo (
mutex) controla la exclusión mutua a este array. El arraysyncde semáforos proporciona la sincronización entre filósofos. - Destacar las líneas
28y29, en ellas se evita un deadlock.
1: # philosofers_2.py 2: status[5] = [THINKING, ..., THINKING] 3: Semaphore sync[5] = [0, 0, 0, 0, 0] 4: Semaphore mutex = 1 5: def pick(i): 6: mutex.acquire() 7: status[i] = HUNGRY 8: canEat(i) 9: mutex.release() 10: sync[i].acquire() 11: 12: def right(i): 13: return (i+1)%5 14: 15: def left(i): 16: return (i-1)%5 17: 18: def canEat(i): 19: if status[i] == HUNGRY and 20: status[left(i)] != EATING and 21: status[right(i)] != EATING: 22: status[i] = EATING 23: sync[i].release() 24: 25: def release(i): 26: mutex.acquire() 27: status[i] = THINKING 28: canEat(left(i)) 29: canEat(right(i)) 30: mutex.release()
19. Aclaraciones
- En ningún caso estas transparencias son la bibliografía de la asignatura, por lo tanto debes estudiar, aclarar y ampliar los conceptos que en ellas encuentres empleando los enlaces web y bibliografía recomendada que puedes consultar en la página web de la ficha de la asignatura y en la web propia de la asignatura.